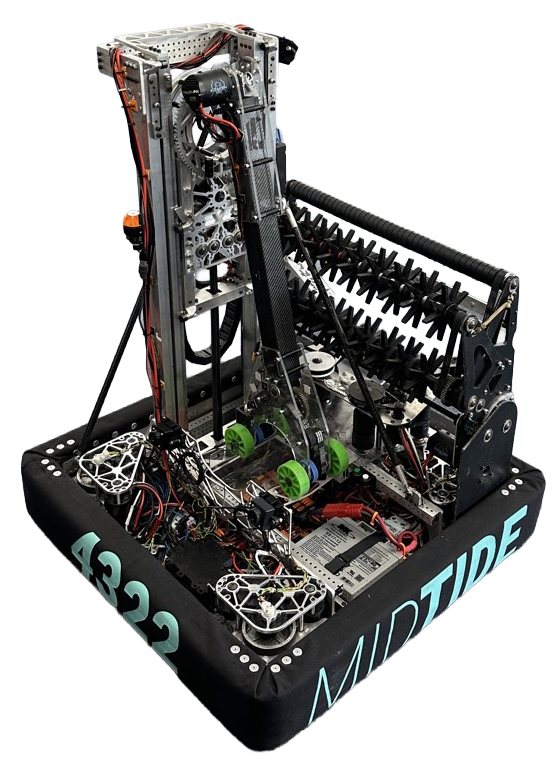
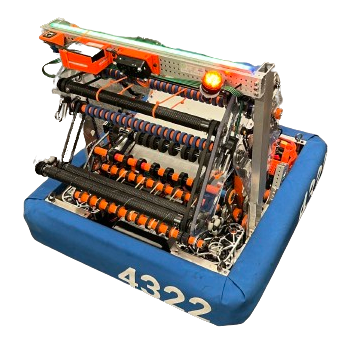
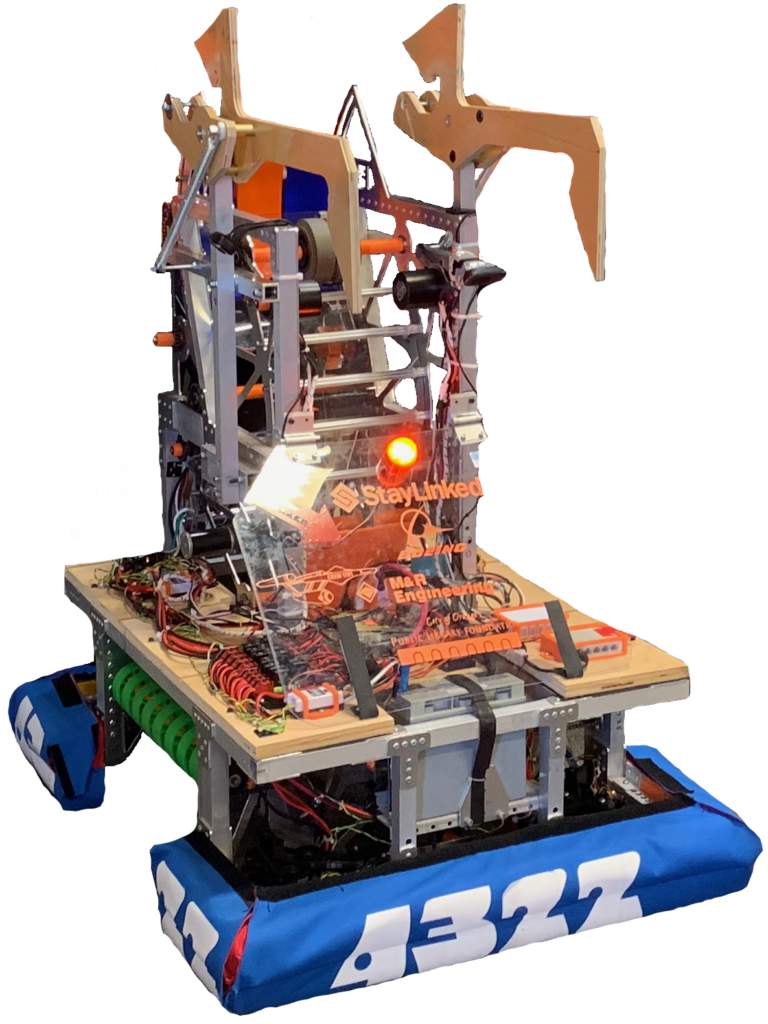
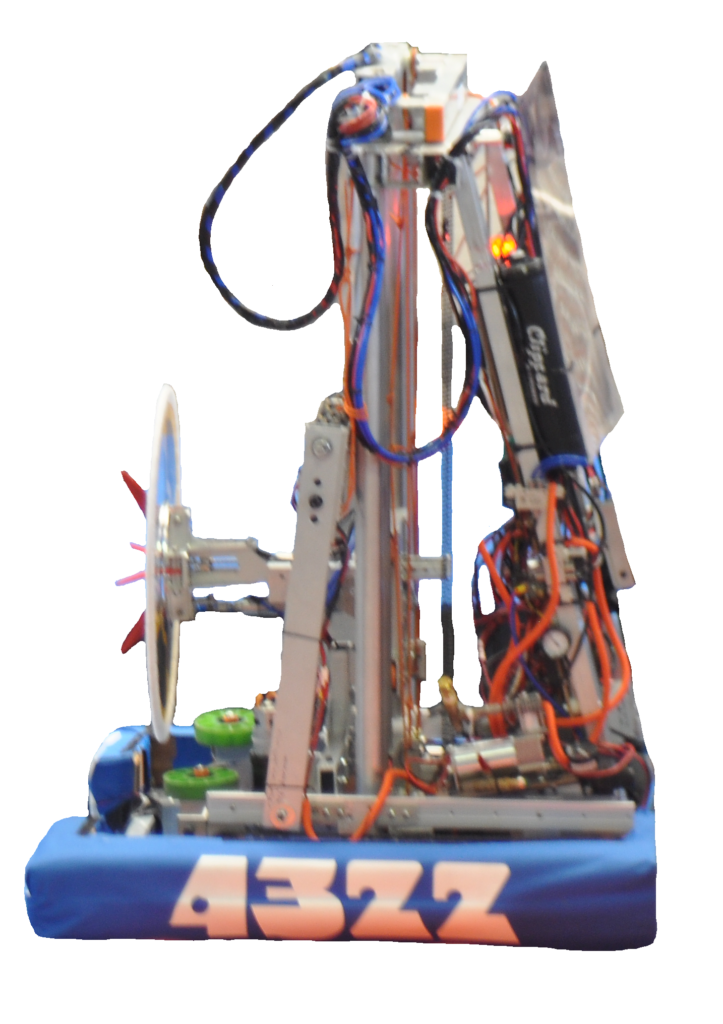
The Robots Centrifuge | 2026 MIDTIDE | 2025 Offseason TURBO | 2025 TOAST | 2024 Offseason CRUSH | 2024 Nemo | 2023 Sheldon | 2022 Citron | 2020 – 2021 Stretch 2.0 | 2019 Stretch | 2018 Southpaw | 2017 Overclocked | 2016 Clementine | 2015 Tim | 2014 Fred | 2013 2012 Share this: Share on X (Opens in new window) X Share on Facebook (Opens in new window) Facebook Email a link to a friend (Opens in new window) Email More Share on LinkedIn (Opens in new window) LinkedIn Share on Reddit (Opens in new window) Reddit Print (Opens in new window) Print