
2024 CRESCENDO
Robot Specifications
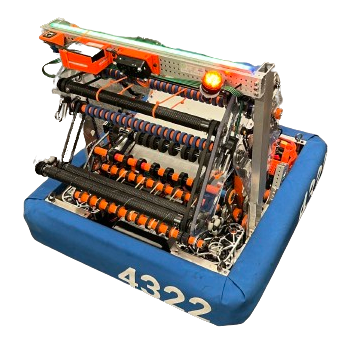
Drivebase
We have a 26 x 26 inch frame size and have level 2 mk4i modules with 16 tooth pinions and grip lock wheels. We use Kraken X60s as drive motors and Falcon 500s as steering motors.
Intake
Our over the bumper floor intake is used to get close NOTES in auto. It is a touch-it-own-it intake with 1⅜ inch wheels and 1.25 inch rollers with cat tongue tape. Omni wheels allow the intake to drive along the floor.
Tunnel
Our tunnel uses 1.5 inch wheels, 1.625 inch wheels, and 2 inch wheels to transfer NOTES from the intake into the outtake.
Shooter
The shooter pivot is powered by a Kraken X60 and changes shooting angle using chain and sprockets. We have 4 inch diameter stealth wheels as our flywheels and they are powered by two Falcon 500s. We score in the SPEAKER and AMP.
Vision
Our robot uses 2 Limelight 3s: one for tracking NOTES and the other for updating odometry.
Software
Our robot was programmed in Java using WPI’s command-based interface.
Events
- Hueneme Port Regional – Port Hueneme, CA
- Central Valley Regional – Fresno, CA
- Aerospace Valley Regional – Lancaster, CA
- FIRST Championship | Milstein Division – Houston, TX
Looking for offseason events? Check out our robot TOAST!
Hueneme Port Matches
| Match # | Alliance | Result | Video |
|---|---|---|---|
| Qualification 8 | Blue | Win | ✅ |
| Qualification 16 | Blue | Win | ✅ |
| Qualification 20 | Red | Loss | ✅ |
| Qualification 27 | Red | Win | ✅ |
| Qualification 41 | Blue | Loss | ✅ |
| Qualification 46 | Blue | Loss | ✅ |
| Qualification 51 | Red | Loss | ✅ |
| Qualification 62 | Red | Loss | ✅ |
| Qualification 75 | Blue | Loss | ✅ |
Central Valley Matches
| Match # | Alliance | Result | Video |
|---|---|---|---|
| Qualification 1 | Red | Loss | ✅ |
| Qualification 9 | Blue | Win | ✅ |
| Qualification 16 | Red | Win | ✅ |
| Qualification 25 | Blue | Win | ✅ |
| Qualification 32 | Red | Win | ✅ |
| Qualification 37 | Blue | Win | ✅ |
| Qualification 45 | Red | Loss | ✅ |
| Qualification 49 | Blue | Loss | ✅ |
| Qualification 53 | Blue | Loss | ✅ |
| Qualification 61 | Blue | Loss | ✅ |
| Qualification 70 | Blue | Win | ✅ |
| Qualification 74 | Red | Loss | ✅ |
Aerospace Valley Matches
| Match # | Alliance | Result | Video |
|---|---|---|---|
| Qualification 4 | Blue | Loss | ✅ |
| Qualification 10 | Blue | Loss | ❌ |
| Qualification 15 | Red | Win | ✅ |
| Qualification 24 | Blue | Win | ✅ |
| Qualification 28 | Red | Loss | ✅ |
| Qualification 35 | Blue | Loss | ✅ |
| Qualification 43 | Red | Loss | ✅ |
| Qualification 48 | Blue | Win | ✅ |
| Qualification 58 | Red | Loss | ✅ |
| Qualification 62 | Red | Win | ✅ |
| Qualification 68 | Red | Win | ✅ |
| Qualification 74 | Red | Win | ✅ |
| Semifinals Match 3 | Red | Win | ✅ |
| Semifinals Match 8 | Red | Win | ✅ |
| Semifinals Match 11 | Blue | Win | ✅ |
| Finals Match 1 | Red | Tie | ✅ |
| Finals Match 2 | Red | Loss | ✅ |
| Finals Match 3 | Red | Win | ✅ |
| Finals Match 4 | Red | Win | ✅ |
Milstein Division
Milstein Division Matches
| Match # | Alliance | Result | Video |
|---|---|---|---|
| Qualification 6 | Red | Win | ✅ |
| Qualification 15 | Blue | Win | ✅ |
| Qualification 27 | Red | Win | ✅ |
| Qualification 44 | Blue | Loss | ✅ |
| Qualification 53 | Blue | Win | ✅ |
| Qualification 69 | Red | Loss | ✅ |
| Qualification 83 | Blue | Loss | ✅ |
| Qualification 94 | Blue | Loss | ✅ |
| Qualification 106 | Red | Loss | ✅ |
| Qualification 119 | Red | Win | ✅ |
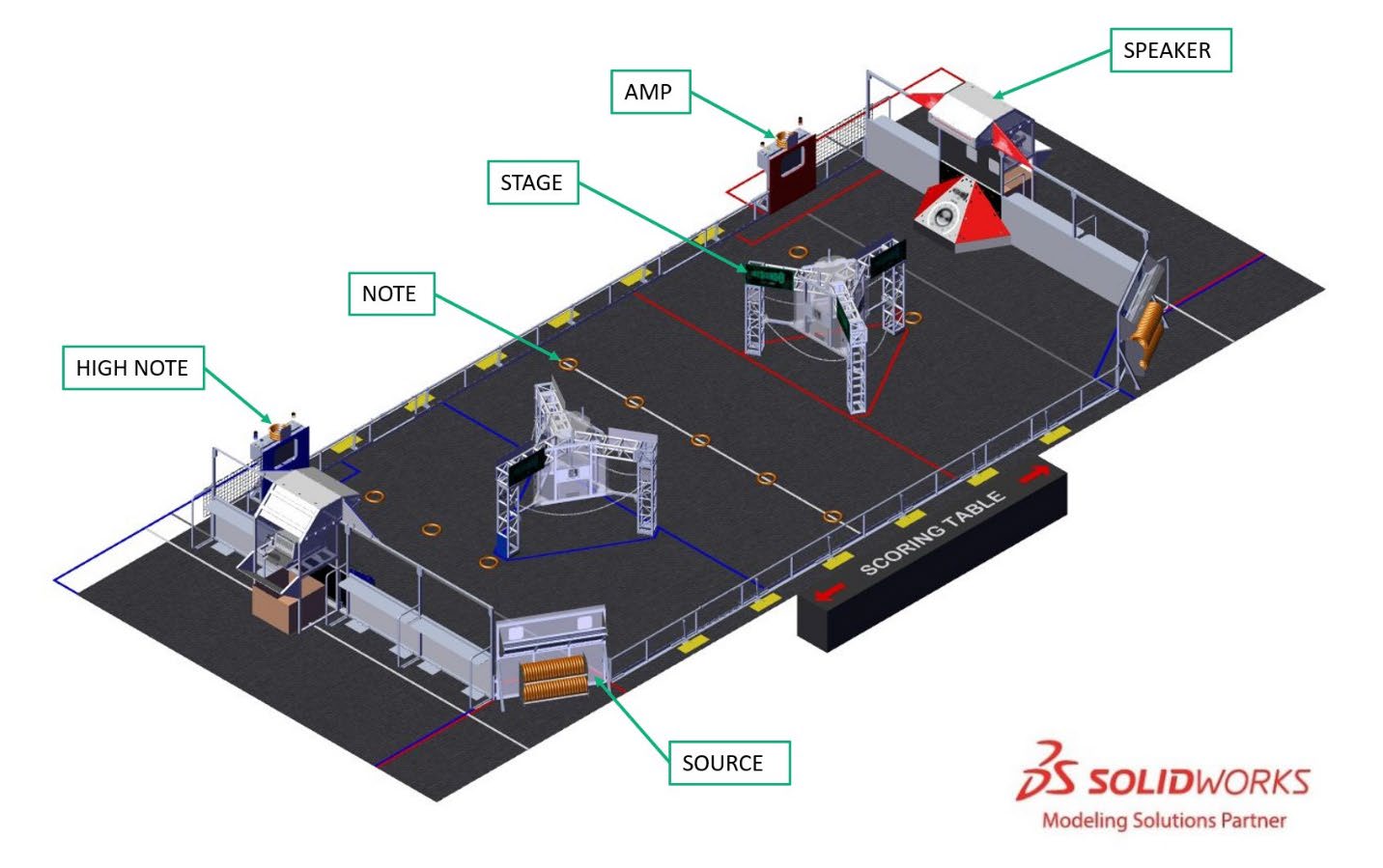
In CRESCENDO℠ presented by Haas, two competing alliances are invited to score notes, amplify their speaker, harmonize onstage, and take the spotlight before time runs out. Alliances earn additional rewards for meeting specific scoring thresholds and for cooperating with their opponents.
During the first 15 seconds of the match, robots are autonomous. Without guidance from their drivers, robots leave their starting zone, score notes in their speaker or amp, and collect and score additional notes.
During the remaining 2 minutes and 15 seconds, drivers control their robots. Robots collect notes from human players at their source and score them in their amp and speaker. Each time an alliance gets 2 notes in their amp, the human player can amplify their speaker for 10 seconds. Notes scored in an amplified speaker are worth more points than those scored in an unamplified speaker.
A human player may choose to repurpose a note scored in their amp in cooperation with their opponent. If each alliance repurposes a note by hitting their Coopertition button in the first 45 seconds of teleop, all teams in the match receive a Coopertition point (which influences their rank in the tournament), and the number of notes needed for the melody bonus is reduced.
As time runs out, robots race to get onstage and deliver notes to their traps. Harmonizing robots, i.e. robots sharing a chain, earn an added bonus. Robots earn even more points if a human player spotlights robots on a chain by scoring a note on the chain’s microphone.
The alliance that earns the most points wins the match!