
2025 REEFSCAPE
Robot Specifications
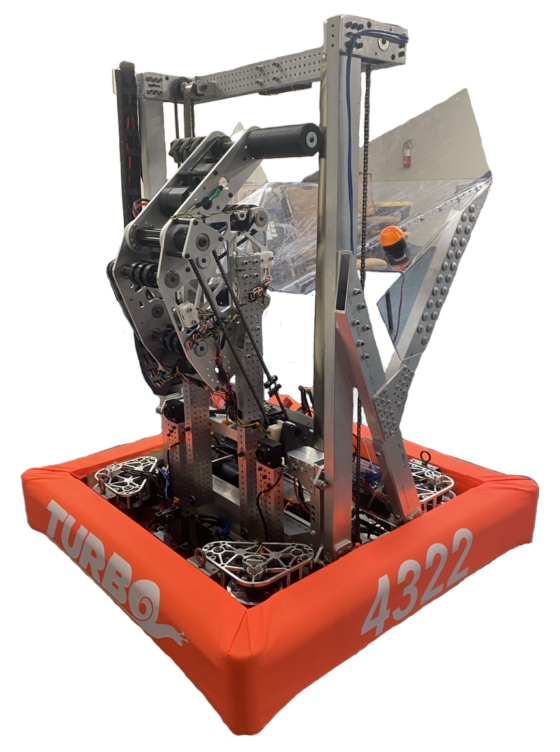
- Status: Retired
- Weight: 115 lbs
- Size: 26.5” W x 26.5” L x 42” H
- 4-wheel SDS Mk4i swerve drive
- Funnel intake for Coral Station
- One-stage, chain-driven elevator
- End effector able to score Coral on Levels 1-3 of the reef and remove algae
- Deployable barb style climber pivots cage to deep climb
Events
- Los Angeles Regional – Los Angeles, CA
- Central Valley Regional – Fresno, CA
- FIRST Championship | Milstein Division – Houston, TX
Robot
Regional Match Videos
Championship Match Videos
Game Animation

Los Angeles Regional
Central Valley Regional
Los Angeles Matches
| Match # | Alliance | Result | Video |
|---|---|---|---|
| Qualification 4 | Red | Win | ✅ |
| Qualification 9 | Red | Win | ✅ |
| Qualification 15 | Red | Win | ✅ |
| Qualification 24 | Blue | Win | ✅ |
| Qualification 30 | Red | Loss | ✅ |
| Qualification 41 | Blue | Win | ✅ |
| Qualification 49 | Blue | Loss | ✅ |
| Qualification 55 | Blue | Win | ✅ |
| Qualification 64 | Red | Win | ✅ |
| Qualification 69 | Red | Loss | ✅ |
| Semifinals Match 3 | Red | Win | ✅ |
| Semifinals Match 8 | Red | Win | ✅ |
| Semifinals Match 11 | Blue | Loss | ✅ |
| Semifinals Match 13 | Red | Win | ✅ |
| Finals Match 1 | Blue | Loss | ✅ |
| Finals Match 2 | Blue | Loss | ✅ |
Central Valley Matches
| Match # | Alliance | Result | Video |
|---|---|---|---|
| Qualification 3 | Blue | Loss | ✅ |
| Qualification 13 | Red | Win | ✅ |
| Qualification 21 | Blue | Win | ✅ |
| Qualification 27 | Red | Win | ✅ |
| Qualification 35 | Red | Loss | ❌ |
| Qualification 42 | Red | Win | ❌ |
| Qualification 49 | Blue | Win | ❌ |
| Qualification 55 | Red | Win | ❌ |
| Qualification 61 | Red | Loss | ✅ |
| Qualification 66 | Blue | Loss | ✅ |
| Qualification 71 | Blue | Win | ✅ |
| Semifinals Match 4 | Blue | Win | ✅ |
| Semifinals Match 8 | Blue | Loss | ✅ |
| Semifinals Match 10 | Red | Loss | ✅ |
Milstein Division Matches
| Match # | Alliance | Result | Video |
|---|---|---|---|
| Qualification 10 | Blue | Loss | ✅ |
| Qualification 20 | Red | Loss | ✅ |
| Qualification 32 | Red | Win | ✅ |
| Qualification 44 | Blue | Win | ✅ |
| Qualification 56 | Blue | Win | ✅ |
| Qualification 64 | Red | Loss | ✅ |
| Qualification 87 | Red | Loss | ✅ |
| Qualification 98 | Blue | Loss | ✅ |
| Qualification 109 | Blue | Loss | ✅ |
| Qualification 117 | Blue | Win | ✅ |
Beneath the ocean’s surface lies our planet’s most complex ecosystems, full of life and potential for exploration and learning, where each inhabitant has a role to play in building a thriving environment.
During the 2024-2025 FIRST® season, FIRST® DIVE℠ presented by Qualcomm, teams will use their STEM and collaboration skills to explore life beneath the surface of the ocean. Along the way, we’ll uncover the potential in each of us to strengthen our community and innovate for a better world with healthy oceans.
