2026 REBUILT
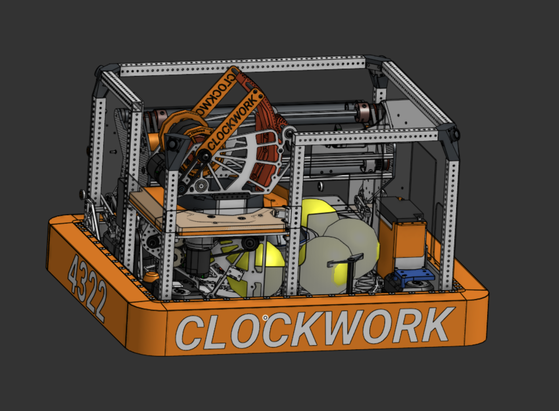
Robot Specifications
- Status: Active
- Weight: 109 lbs
- Size: 29.5” W x 25.5” L x 22” H
- 4-wheel SDS Mk5n swerve drive
- Fuel ground intake
- 720° turret
- 10 in colson wheel spindexer
Events
- CA District Los Angeles – El Segundo, CA
- CA District Orange County – Mission Viejo, CA
- FIRST California Southern State Championship – Anaheim, CA

Los Angeles District Event Matches
| Match # | Alliance | Result | Video |
|---|---|---|---|
| Qualification 3 | Red | Win | ✅ |
| Qualification 10 | Blue | Win | ✅ |
| Qualification 15 | Blue | Loss | ✅ |
| Qualification 22 | Red | Win | ✅ |
| Qualification 29 | Blue | Tie | ✅ |
| Qualification 36 | Blue | Win | ✅ |
| Qualification 43 | Blue | Win | ✅ |
| Qualification 55 | Red | Win | ✅ |
| Qualification 63 | Blue | Win | ✅ |
| Qualification 69 | Red | Win | ✅ |
| Qualification 76 | Red | Loss | ✅ |
| Semifinals Match 2 | Red | Loss | ✅ |
| Semifinals Match 5 | Blue | Win | ✅ |
| Semifinals Match 10 | Blue | Loss | ✅ |
Orange County District Event Matches
| Match # | Alliance | Result | Video |
|---|---|---|---|
| Qualification 4 | Red | Loss | ✅ |
| Qualification 8 | Blue | Win | ✅ |
| Qualification 16 | Red | Win | ✅ |
| Qualification 24 | Blue | Loss | ✅ |
| Qualification 30 | Blue | Win | ✅ |
| Qualification 35 | Red | Win | ✅ |
| Qualification 40 | Red | Win | ✅ |
| Qualification 45 | Red | Loss | ✅ |
| Qualification 51 | Blue | Win | ✅ |
| Qualification 60 | Blue | Win | ✅ |
| Qualification 64 | Red | Win | ✅ |
| Qualification 69 | Blue | Loss | ✅ |
| Semifinals Match 3 | Red | Win | ✅ |
| Semifinals Match 8 | Red | Win | ✅ |
| Semifinals Match 11 | Blue | Loss | ✅ |
| Semifinals Match 13 | Red | Win | ✅ |
| Finals Match 1 | Blue | Loss | ✅ |
| Finals Match 2 | Blue | Loss | ✅ |
Championship Galileo Division Matches
| Match # | Alliance | Result | Video |
|---|---|---|---|
| Qualification 13 | Blue | Loss | ✅ |
| Qualification 25 | Red | Win | ✅ |
| Qualification 35 | Red | Loss | ✅ |
| Qualification 49 | Red | Loss | ✅ |
| Qualification 63 | Red | Loss | ✅ |
| Qualification 73 | Blue | Win | ✅ |
| Qualification 88 | Blue | Win | ✅ |
| Qualification 98 | Blue | Loss | ✅ |
| Qualification 108 | Blue | Loss | ✅ |
| Qualification 122 | Blue | Win | ✅ |
| Semifinals Match 3 | Blue | Win | ✅ |
| Semifinals Match 8 | Red | Win | ✅ |
| Semifinals Match 11 | Blue | Loss | ✅ |
| Semifinals Match 13 | Red | Win | ✅ |
| Finals Match 1 | Blue | Loss | ✅ |
| Finals Match 2 | Blue | Loss | ✅ |
In REBUILT™ presented by Haas, two competing alliances are invited to score fuel, cross obstacles, and climb the tower before time runs out. Alliances earn additional rewards for meeting specific scoring thresholds.
During the first 20 seconds of the match, robots are autonomous. Without guidance from their drivers, robots score fuel into their hub. Fuel can be pre-loaded into a robot, obtained from the human player, collected at the depot, or picked up throughout the center of the field. Some robots may also climb the tower to obtain additional points.
During the remaining 2 minutes and 20 seconds, drivers control their robots. Based on the result of autonomous play, alliance hubs will alternate between active and inactive, shifting gameplay between both sides of the field. Robots can collect fuel at any point in the match and may control any amount of fuel at a time. Drivers control their robots to score fuel into their hub while it is active and may perform defensive strategies or collect more fuel while their hub is inactive.
As time runs out, all hubs become active, allowing all robots to score. Robots can climb to the tower’s highest heights to score additional points and claim match bonuses to increase their position in the rankings.
The alliance that earns the most points wins the match!