
2023 CHARGED UP
Robot Specifications
- Drivebase
- Auto rotate to scoring and loading directions
- Quick crossing of the charge station without tipping
- Fully protected 12 motor swerve modules
- Steel bellypan for low C.G.
- Arm
- Fast telescoping single jointed arm for scoring high, mid, and low grid
- Powered by 3 NEOs
- Signal LEDs
- Communicate game piece selection to human player
Events
- Orange County Regional – Costa Mesa, CA
- San Diego Regional presented by Qualcomm – San Diego, CA
- SoCal Showdown – El Segundo, CA
- Tidal Tumble – Ventura, CA
- Beach Blitz – Mission Viejo, CA
Season Awards
- 2023 San Diego Regional – Creativity Award sponsored by Rockwell Automation

OC Regional Matches
| Match # | Alliance | Result | Video |
|---|---|---|---|
| Qualification 5 | Red | Win | ✅ |
| Qualification 11 | Red | Win | ✅ |
| Qualification 18 | Red | Win | ✅ |
| Qualification 30 | Red | Win | ✅ |
| Qualification 39 | Red | Win | ✅ |
| Qualification 47 | Blue | Win | ✅ |
| Qualification 52 | Blue | Win | ✅ |
| Qualification 60 | Blue | Win | ✅ |
| Qualification 70 | Blue | Win | ✅ |
| Qualification 76 | Blue | Loss | ✅ |
| Elims, Match 1 | Red | Win | ✅ |
| Elims, Match 2 | Red | Win | ✅ |
| Elims, Match 3 | Red | Win | ✅ |
| Elims, Match 4 | Red | Loss | ✅ |
San Diego Regional Matches
| Match # | Alliance | Result | Video |
|---|---|---|---|
| Qualification 1 | Red | Loss | ✅ |
| Qualification 12 | Blue | Win | ✅ |
| Qualification 19 | Red | Win | ✅ |
| Qualification 26 | Blue | Loss | ✅ |
| Qualification 39 | Red | Win | ✅ |
| Qualification 49 | Blue | Loss | ✅ |
| Qualification 57 | Blue | Win | ✅ |
| Qualification 62 | Blue | Loss | ❌ |
| Qualification 73 | Red | Win | ❌ |
| Elims, Match 1 | Blue | Loss | ✅ |
| Elims, Match 5 | Red | Loss | ❌ |
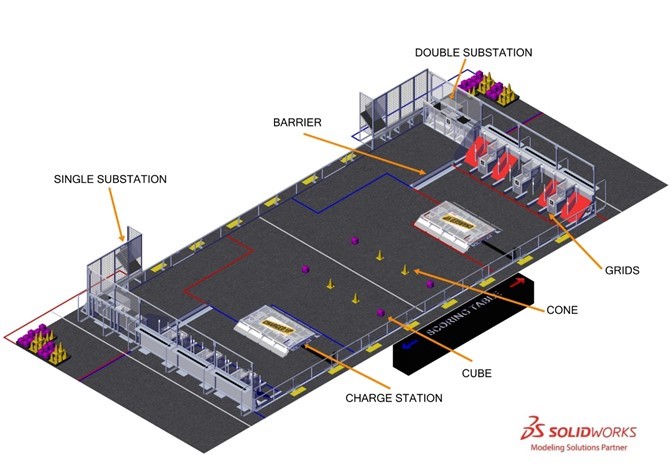
In CHARGED UP℠ presented by Haas, two competing alliances are invited to process game pieces to bring energy to their community. Each alliance brings energy to their community by retrieving their game pieces from substations and scoring it into the grid. Human players provide the game pieces to the robots from the substations. In the final moments of each match, alliance robots race to dock or engage with their charge station!
Each match begins with a 15-second autonomous period, during which time alliance robots operate only on pre-programmed instructions to score points by:
- leaving their community,
- retrieving and scoring game pieces onto the grid,
- docking on or engaging with their charge station.
In the final 2 minutes and 15 seconds of the match, drivers take control of the robots and score points by:
- continuing to retrieve and score their game pieces onto the grid
- and docking on or engaging with their charge station.
The alliance with the highest score at the end of the match wins!